
Mechanical characteristics of series excited DC motors for electric forklifts
The mechanical characteristics of a series excited DC motor for electric forklifts refer to the relationship between the electromagnetic torque and speed of the DC motor. If this relationship is represented by a graph, it is called a mechanical characteristic curve.
To illustrate the relationship between the electromagnetic torque of a series excited DC motor and its rotational speed, we first take a look at the power supply voltage applied to the motor and where it is used in a series excited DC motor, as shown in Figure 1:
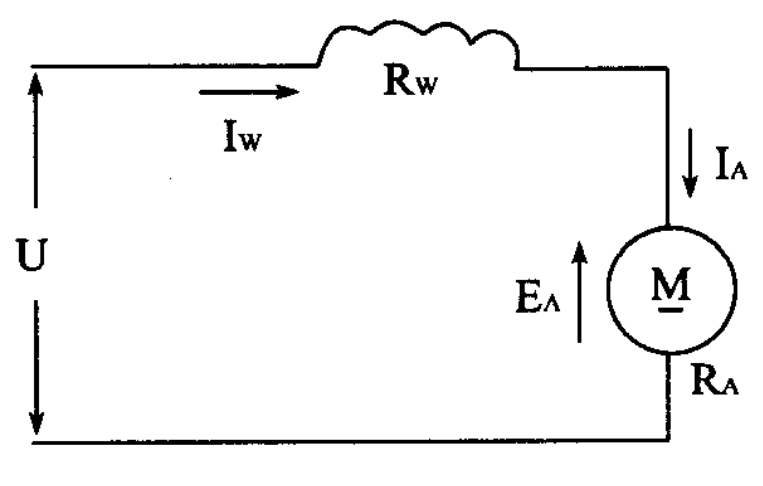
Figure 1 Series Excitation DC Motor Circuit
In the figure, U is the power supply voltage, Rw、RA Represent the resistance of the excitation winding and the armature winding, respectively,Ea It is the back electromotive force in the armature. Obviously, the external power supply voltage U overcomes the armature back electromotive force on the one hand EA,On the other hand, it is necessary to generate a voltage drop at the RA of R, so using the expression is:
U= Ea+ IARA+IWRw
Because universal motor:Iw=IA。
so:
U=EA+IA (RA+ Rw)
Using the formulaEA=CePn代人式U=EA+IA (RA+ Rw)we can obtain:
U=Ceφn +IA (RA+ RW)
After sorting, it can be concluded that:n=[U-I A(RA+RW)]/Ceφ
From the equationU=EA+IA (RA+ Rw), it can be seen that,The electromagnetic torque T=C I needs to increase,It is necessary to increase; Or even more; Or both can be increased. If the electromagnetic torque needs to be reduced, it also needs to be reduced. However, the increase or decrease of electromagnetic torque is determined by the load torque. The relationship between the two is numerically equal in magnitude, but opposite in direction.
From equationn=[U-I A(RA+RW)]/Ceφ,It is known that,When the load torque increases, the electromagnetic torque of the motor will inevitably increase, that is, the increase in I will also increase, so n will decrease, that is, the speed n will decrease; When the load torque is small, the total value is not large, and the magnetic circuit is not saturated. As the load torque increases, it increases proportionally, so the speed n decreases quickly; When the load torque is high, the total value of I has already increased, and the magnetic circuit is saturated. At this point, the load increases, but it no longer increases. Therefore, although the speed n still decreases, the decrease is relatively gradual.
If the abscissa is used to represent the torque T and the ordinate is used to represent the speed n, then the mechanical characteristics (natural characteristics) of the series excited DC motor system of the electric forklift is approximately a hyperbola, as shown in Figure 2.
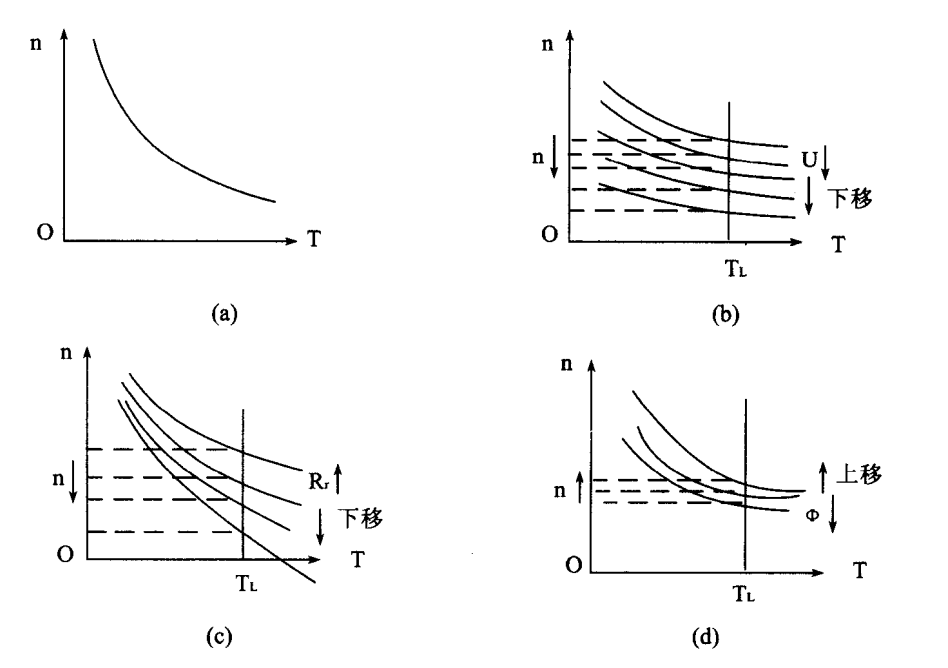
(a) Natural characteristics; (b) RT=0 to adjust the characteristics of U; (c) Characteristics when U remains unchanged and R changes;
(d) U remains unchanged, Rr=0 adjustment φ Characteristics of
Fig. 2 Mechanical Characteristics of universal motor
Among them, Figure 2 (a) refers to the characteristic curve obtained from the series excited electric power supply voltage U, the resistance and magnetic flux in the armature circuit without manual adjustment, and is therefore called the natural characteristic. But when the power voltage U of the motor is changed, or an external resistor Rr is connected in series in the armature circuit, or the main magnetic flux of the motor is changed φ The characteristic curves of the electric motor are about to change. Figures 2 (b), (c), and (d) show reducing the power supply voltage U, increasing the external resistance Rr of the armature circuit, and reducing magnetic flux φ Changes in mechanical characteristics of. Overall, the mechanical characteristics of series excited DC motors have the following characteristics:
- (such as empty car driving and empty hook lowering), thereby improving the productivity of the machinery; Automatically reducing the speed during heavy loading can ensure production safety and prevent motor overload. Therefore, universal motor is most suitable for the operation requirements of electric traction vehicles (such as electric locomotive, battery vehicles, etc.).
- The degree of 'flying car'. The electromagnetic torque T required for no-load or light load is very small, so the armature current IA and magnetic flux φ It is also very small, as can be seen from the mechanical characteristics of Equation 1 or Figure 2, where the motor speed n will be very high. In order to prevent rotor damage accident caused by motor "runaway", universal motor is not allowed to operate under no-load or light load (lower than 20%~30% of rated load). However, in electric forklifts or electric tractors, due to the vehicle's inherent self weight, the electric motor will not run empty, so this danger is not significant.
- Universal motor has large starting capacity and overload capacity. The starting and overload capacity of a DC motor is limited by the allowable current overload ratio of the motor. The current overload ratio can worsen the operation of the commutator and brush, causing commutation sparks. Therefore, the current overload ratio is generally limited to 2.0 to 2.5 times the rated current.

When the series excitation DC motor of an electric forklift operates normally, the magnetic circuit is not saturated, which can be approximately considered as magnetic flux φ It is proportional to the excitation current IW (equal to the armature current IA), Namely φ∞ IA ², According to the equation T=CTIA φ, Obtaining T ∞ IA ², The motor torque is proportional to the square of the armature current. Therefore, under the condition of allowable current overload multiple, the torque overload multiple of universal motor is larger, that is, it has larger starting capacity and overload capacity.
-
 GB3836-2021 Standard Explosion Proof Forklift Grade Price Difference AnalysisExplosion-proof forklifts for chemical warehouses follow Zone 1/2 and IIA/IIB/IIC standards. Zone 1 costs 20%-35% more than Zone 2, IIC adds 30%-40%. Pick proper grades to avoid overpaying or unsafe equipment.
GB3836-2021 Standard Explosion Proof Forklift Grade Price Difference AnalysisExplosion-proof forklifts for chemical warehouses follow Zone 1/2 and IIA/IIB/IIC standards. Zone 1 costs 20%-35% more than Zone 2, IIC adds 30%-40%. Pick proper grades to avoid overpaying or unsafe equipment.Do you like ?0
Read more -
 Factory Direct Supply Compact Warehouse Electric Stacker & Truck Newnewton4000㎡ factory with full self-production of walkie/rider stackers, 3-wheel forklifts & pallet trucks, customizable. Transparent pricing, 15%-25% bulk discount, next-day delivery for Jiangsu-Zhejiang-Shanghai, 1-year warranty & on-site layout survey.
Factory Direct Supply Compact Warehouse Electric Stacker & Truck Newnewton4000㎡ factory with full self-production of walkie/rider stackers, 3-wheel forklifts & pallet trucks, customizable. Transparent pricing, 15%-25% bulk discount, next-day delivery for Jiangsu-Zhejiang-Shanghai, 1-year warranty & on-site layout survey.Do you like ?0
Read more -
 Chinese & Imported Small Electric Forklift Brand Comparison For Compact StorageCost-effective lithium forklift guide for small warehouses: 8 domestic & 2 imported brands of stackers & pallet trucks with pros, cons & applicable scenarios. Budget buyers pick factory direct lead-acid/lithium models to cut warehouse costs.
Chinese & Imported Small Electric Forklift Brand Comparison For Compact StorageCost-effective lithium forklift guide for small warehouses: 8 domestic & 2 imported brands of stackers & pallet trucks with pros, cons & applicable scenarios. Budget buyers pick factory direct lead-acid/lithium models to cut warehouse costs.Do you like ?0
Read more -
 Stand-on Electric Stacker Factory Direct Supply With Abundant Ready StockJiangsu local stacker factory with in-house welding & lithium lines. 1–2t stand-on lithium stackers in stock for 2.8m narrow aisles, non-OEM, same-day delivery for Jiangsu-Zhejiang-Shanghai. Customizable, 1-year warranty & 24h online service, export available.
Stand-on Electric Stacker Factory Direct Supply With Abundant Ready StockJiangsu local stacker factory with in-house welding & lithium lines. 1–2t stand-on lithium stackers in stock for 2.8m narrow aisles, non-OEM, same-day delivery for Jiangsu-Zhejiang-Shanghai. Customizable, 1-year warranty & 24h online service, export available.Do you like ?0
Read more -
 Electric Forklift Brake System Maintenance 3 Practical Servicing Key PointsNeglecting forklift brake maintenance causes failure and deviation. Three key tips: never mix brake fluids, replace worn brake pads timely, bleed pipelines and adjust clearance after repairs to cut costs and avoid collisions.
Electric Forklift Brake System Maintenance 3 Practical Servicing Key PointsNeglecting forklift brake maintenance causes failure and deviation. Three key tips: never mix brake fluids, replace worn brake pads timely, bleed pipelines and adjust clearance after repairs to cut costs and avoid collisions.Do you like ?0
Read more -
 Is 2WD Rough Terrain Forklift High On Fuel Consumption | 2026 Real Test DataFuel consumption guide for rough-terrain forklifts in mines, farms and building yards. 2/3/5t 2WD diesel models consume 0.6–1L less per hour than heavier 4WD units, saving over 10,000 RMB yearly with 2000 working hours.
Is 2WD Rough Terrain Forklift High On Fuel Consumption | 2026 Real Test DataFuel consumption guide for rough-terrain forklifts in mines, farms and building yards. 2/3/5t 2WD diesel models consume 0.6–1L less per hour than heavier 4WD units, saving over 10,000 RMB yearly with 2000 working hours.Do you like ?0
Read more








